Predation is one of the main drivers of social grouping in animals. Hence, understanding when, where, and how predators attack animal groups, and the types of anti-predator benefits grouping animals may experience, has been of long-standing interest. Although it is well appreciated that there is differential predation risk within animal groups, our understanding has nonetheless remained largely focused on marginal predation and selfish herd effects.

In a new paper in eLife (link) I wrote with colleagues from the Max Planck Institute of Animal Behaviour and Princeton University, we try to overcome this gap. Specifically, we ran detailed experiments with live predators attacking live schools of prey to gain a detailed mechanistic understanding of when, where, and who predators attack in schooling prey.

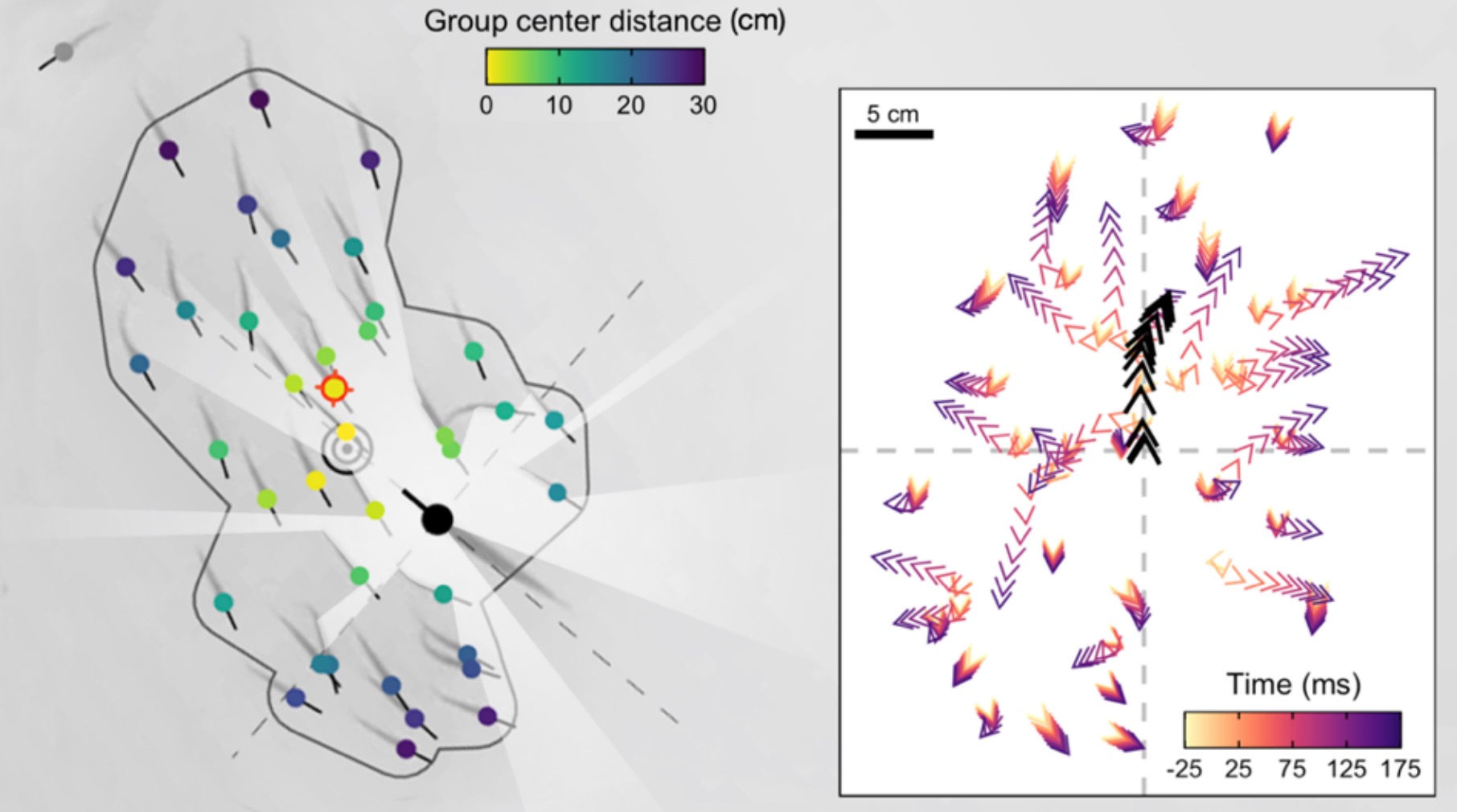
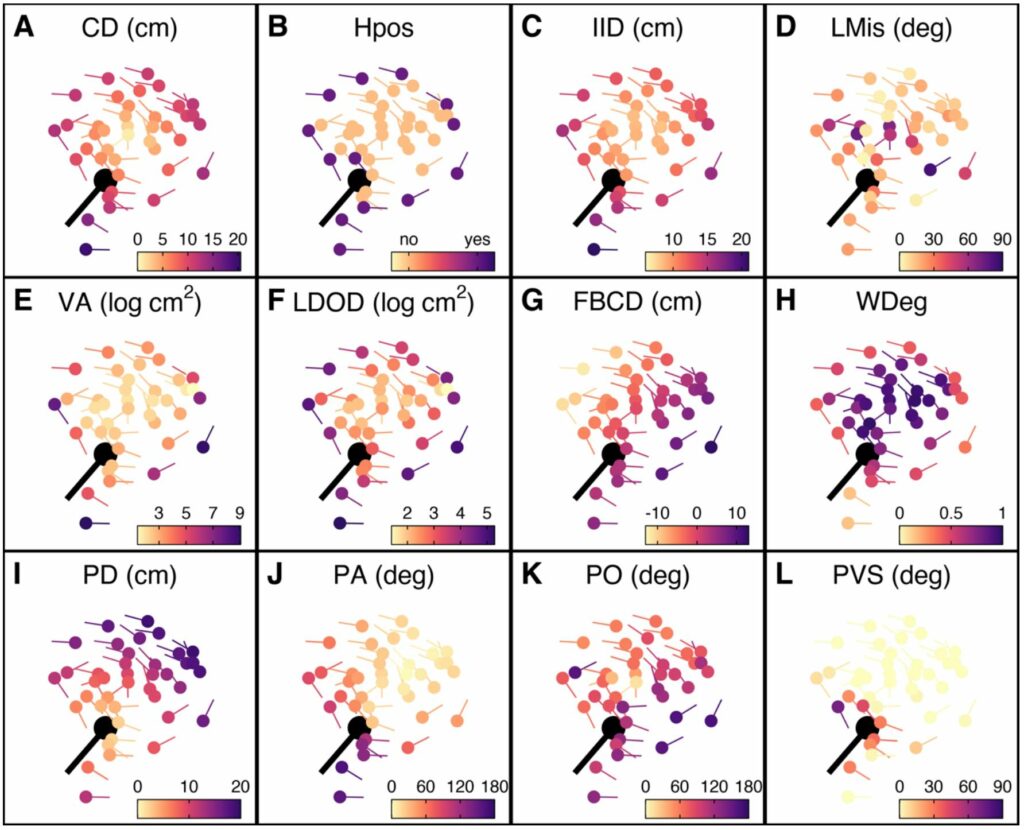
By tracking the attacks in high spatial and temporal detail, we not only provide novel insights into predator decision-making, but show which key features related to both prey and predator predict individual’s risk to be targeted and survive attacks. Consideration of these multi-faceted factors underlying predation risk, in combination with predators’ attack strategy and decision-making, will have important consequences for understanding the costs and benefits of animal grouping and thereby the evolution of social and collective behaviour.
Jolles, J. W., Sosna, M. M. G., Mazué, G. P. F., Twomey, C. R., Bak-Coleman, J., Rubenstein, D. I., & Couzin, I. D. (2022). Both Prey and Predator Features Predict the Individual Predation Risk and Survival of Schooling Prey. eLife, 11, e76344. Doi: 10.7554/eLife.76344