Predation is one of the main drivers of social grouping in animals. Hence, understanding when, where, and how predators attack animal groups, and the types of anti-predator benefits grouping animals may experience, has been of long-standing interest. Although it is well appreciated that there is differential predation risk within animal groups, our understanding has nonetheless remained largely focused on marginal predation and selfish herd effects.
In a new paper in eLife (link) I wrote with colleagues from the Max Planck Institute of Animal Behaviour and Princeton University, we try to overcome this gap. Specifically, we ran detailed experiments with live predators attacking live schools of prey to gain a detailed mechanistic understanding of when, where, and who predators attack in schooling prey.
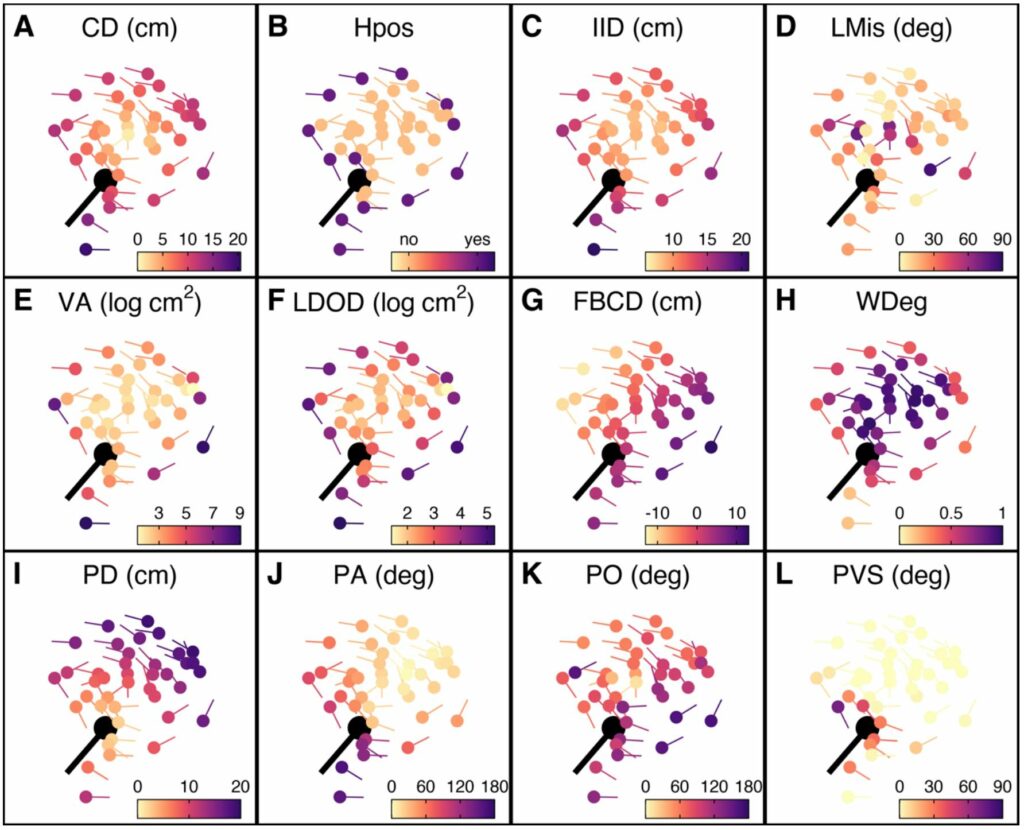
By tracking the attacks in high spatial and temporal detail, we not only provide novel insights into predator decision-making, but show which key features related to both prey and predator predict individual’s risk to be targeted and survive attacks. Consideration of these multi-faceted factors underlying predation risk, in combination with predators’ attack strategy and decision-making, will have important consequences for understanding the costs and benefits of animal grouping and thereby the evolution of social and collective behaviour.
Jolles, J. W., Sosna, M. M. G., Mazué, G. P. F., Twomey, C. R., Bak-Coleman, J., Rubenstein, D. I., & Couzin, I. D. (2022). Both Prey and Predator Features Predict the Individual Predation Risk and Survival of Schooling Prey. eLife, 11, e76344. Doi: 10.7554/eLife.76344
Today my latest paper came out in Biology Letters! You can find it here.
The spectacular and complex visual patterns created by animal groups moving together have fascinated humans since the beginning of time. Think of the highly synchronized movements of a flock of starlings, or the circular motion of a school of barracudas. Using state-of-the-art robotics, a research team from the University of Konstanz, Science of Intelligence, and the Leibniz Institute of Freshwater Ecology and Inland Fisheries (IGB) shows that animals’ speed is fundamental for collective behavioral patterns, and that ultimately it is the faster individuals that have the strongest influence on group-level behavior. The study, published in Biology Letters of the Royal Society, gives new insights on complex collective behavioral patterns in nature, and provides knowledge that could help develop robotic systems that move collectively, such as robot swarms, driverless cars, and drones.
Researchers have long focused on identifying the emergence of collective patterns. Thanks to a combination of behavioral experiments, computer simulations, and field observations, it is clear that many seemingly complex patterns can actually be explained by relatively simple rules: move away from others if they get too near, speed up towards others if they get too far away, and otherwise move at the same speed and align with your group mates.
“Besides understanding the rules that individuals follow when interacting with others, we need to consider the behaviors and characteristics of those individuals that make up the group and determine their influence for collective outcomes” says Dr. Jolle Jolles, a scientist at the Zukunftskolleg, University of Konstanz, and lead author of the study. “Across the animal kingdom, it has been found again and again that animals tend to differ considerably from one another in their behavior such as in terms of their activity, risk-taking, and social behavior“. What are the consequences of this behavioral heterogeneity when it comes to collective behavior? And how can one test for its social consequences?
To disentangle the role of individual differences in collective behavior and the mechanisms underlying this type of behavior, the research team built “Robofish”, a robotic fish that not only realistically looks and behaves like a guppy – a small tropical freshwater fish – , but also interacts with the live fish in a natural way. The experimenters paired the robotic fish with a guppy and programmed it to always follow its partner and copy its movements, lacking however any movement preferences of its own. The team then used high-definition video tracking and a closed-loop feedback system to let the robotic fish respond to the live fish’s actions in real-time.
“One of Robofish’s simple interaction rules was to keep a constant distance to its shoal mate” explains Dr. David Bierbach, who works within the Berlin-based Excellence Cluster ‘Science of Intelligence’ at the HU Berlin and the IGB, and is senior author on the paper. “Using this rule, our Robofish tried to keep the same distance to the live fish by accelerating and decelerating whenever the live fish did. Also, programming the robotic fish without any own movement preferences gave us the unique opportunity to investigate how individual differences in the behavior of the live fish led to group-level differences. In short, with our unique approach, we could isolate the effect of the fish’s movement speed on the pair’s collective behavior“.
The researchers first quantified the guppies’ natural movement speed by observing their movements when alone in an open environment, and found that there were large individual differences in how fast guppies tended to move. When the fish were subsequently tested with Robofish, the fish and Robofish tended to swim naturally together as a pair. However, the researchers observed that there were large differences in the social behaviors between the pairs: pairs in which the guppy had a faster movement speed tended to be much more aligned, more coordinated, and less cohesive, and the guppy emerged as a clearer leader. As Robofish behaved according to the same identical rules with each and every guppy, it is the individual speed of the guppies that must have led to these differences in group-level properties.
By involving state-of-the-art robotics, this research shows that individual speed is a fundamental factor in the emergence of collective behavioral patterns. As individual differences in speed are associated with a broad range of phenotypic traits among grouping animals, such as their size, age, and hunger level, the results of this study may help understand the role of such heterogeneity in animal groups.
Future studies using the interactive Robofish will focus on other aspects of collective behavior: For example, how can animals act in synchrony if they just respond to the actions of their neighbors? “We want to improve Robofish’s software so that it can predict and anticipate the live fish’s next steps, which is assumed to be how animals do it.” says David Bierbach.
Understanding these mechanisms is not only fundamentally important as it reveals information about the mechanisms that underlie collective behavior and decisions, but also because this knowledge can be applied to artificial systems and used to develop machines that move collectively, such as robot swarms, driverless cars, and drones.
From swarm to school, stickleback groups differ repeatedly in their collective performance
among schooling fish, groups can have different collective personalities, with some shoals sticking closer together, being better coordinated, and showing clearer leadership than others.
For centuries, scientists and non-scientists alike have been fascinated by the beautiful and often complex collective behaviour of animal groups, such as the highly synchronised movements of flocks of birds and schools of fish. Often, those spectacular collective patterns emerge from individual group members using simple rules in their interactions, without requiring global knowledge of their group.
In recent years it has also become apparent that, across the animal kingdom, individual animals often differ considerably and consistently in their behaviour, with some individuals being bolder, more active, or more social than others.
New research conducted at the University of Cambridge’s Department of Zoology suggests that observations of different groups of schooling fish could provide important insights into how the make-up of groups can drive collective behaviour and performance.
In the study, published today in the journal Proceedings of the Royal Society B, the researchers created random groups of wild-caught stickleback fish and subjected them repeatedly to a range of environments that included open spaces, plant cover, and patches of food.
My latest paper on the collective behaviour of stickleback shoals is out today in the journal Current Biology!
Jolles, JW, Boogert, NJ, Sridhar, VH, Couzin, ID, Manica, A. (2017) Consistent individual differences drive collective behaviour and group functioning of schooling fish. Current Biology 27: 1-7. doi: 10.1016/j.cub.2017.08.004 (link).
Highly coordinated school of three-spined sticklebacks swimming in the blue waters of the Bodensee near Konstanz, Southern Germany. Photo: Jolle W. Jolles
New research sheds light on how “animal personalities” – inter-individual differences in animal behaviour – can drive the collective behaviour and functioning of animal groups such as schools of fish, including their cohesion, leadership, movement dynamics, and group performance. These research findings from the University of Konstanz, the Max Planck Institute of Ornithology and the University of Cambridge provide important new insights that could help explain and predict the emergence of complex collective behavioural patterns across social and ecological scales, with implications for conservation and fisheries and potentially creating bio-inspired robot swarms. It may even help us understand human society and team performance. The study is published in the 7 September 2017 issue of Current Biology.
Last week I was in Catalunya visiting friends and family and some undistracted paper writing. Catalunya, where my wife grew up, is an amazing place and feels like a second home to me. With the Mediterranean sea and the Pyrenean mountains within half an hour’s drive, there is always a lot to explore.
Hiking up the beautiful Gorge of Sadernes, Catalunya.
During some recent trips, I went hiking in the Pyrenean foothills and discovered schools of Mediterranean barbel (Barbus meridionalis). They seemed to be separate populations living in semi-isolated pools of a small mountain river. This species of Barbus is only native to a small area in and around the Eastern Pyrenees. Sadly, in recent years its numbers have plummeted with 30% (source: IUCN), highlighting an urgent need to better understand their ecology and vulnerabilities.
A shoal of Mediterranean barbel foraging on limestone rocks.
The last few months I have been working hard on the sophisticated new experimental set-ups in the lab with which we will be able to get high spatial and temporal resolution tracking of large schools of fish, in tanks that are up to 3x3m in size!
To get highly accurate spatial data of the fish we need to correct for the distortion of the camera lens, which almost all lenses have to some extent. I just finished the script (in Python) that enables us to undistort the image from a camera using functions in opencv based on a video of a moving checkerboard.
Me calibrating a camera with a checkerboard pattern, with colours showing the output of my python script, with a school of 1000 moderlieschen in the background :)
It works pretty well already, even with non-optimal videos. Next step will be to stitch the videos of multiple linked camera’s.
My research is currently centred around understanding the role of consistent behavioural differences in the collective movements and functioning of animal groups. In particular, I assay large numbers of stickleback fish on various personality traits and expose them in groups to different ecological scenario’s. I have written custom tracking software in Python using the OpenCV library to be able to accurately track the position of individual fish in the freely-moving schools.
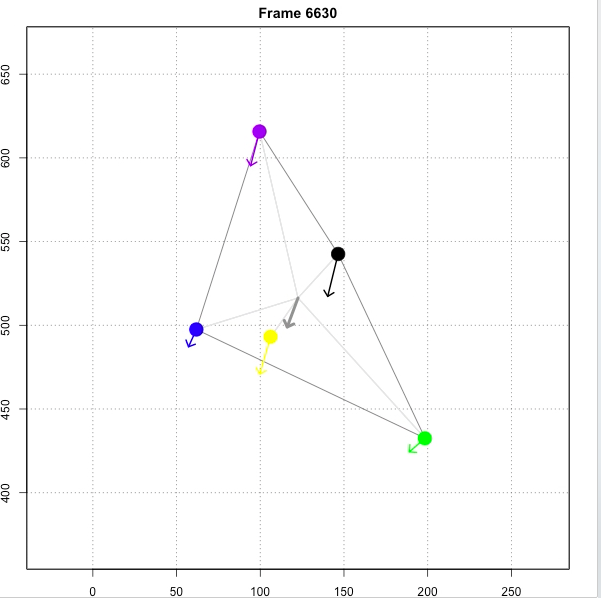
Today I wanted to share a simple visual that highlights the detailed individual-based tracking of a small fish school over time. Each fish is represented by a different colour, with the arrow showing its vectorized movement, with larger arrows indicating a higher speed. The video is centred around the vector of the group as a whole to better visualize the structure of the group over time. Lines indicate the smallest polygon encompassing all individuals and Individual Centre Distances. The moving axes indicate the relative speed of the group in a large circular arena.
In this short section of a 30-min long experimental trial it is clear that the group speed, cohesion, and structure fluctuate over time. At the same time, individuals also maintain to some extent their positions relative to the group centre, such as the green and yellow individual clearly having a stronger pulling power on the movements of the group as a whole.
I used RaspberryPi computers to film the fish, custom Python tracking scripts to acquire individual X,Y coordinates for each individual in the group, R to process the tracking data and acquire movement characteristics, and R with ffmpeg to create the visual.